研究設備
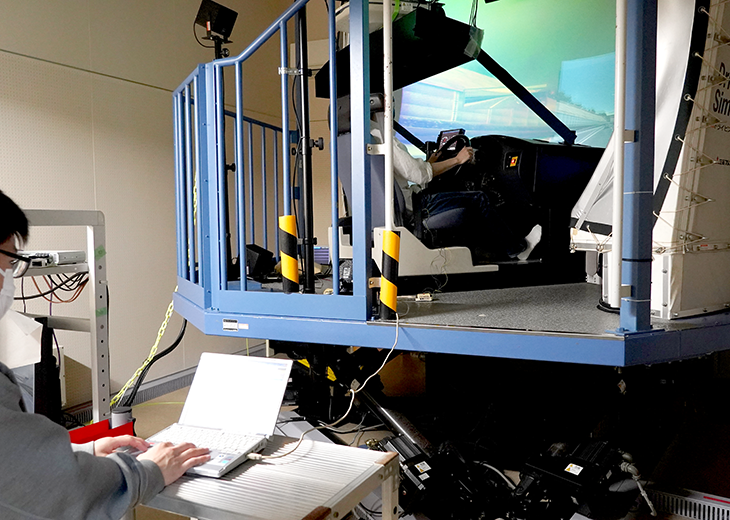
| モーション付きドライビングシミュレータ | |
|---|---|
| 設置場所 | 38号館118室 |
| 管理者 | 栗谷川幸代 |
| 説明 | 3次元映像による奥行き表現と動揺装置によりドライバに高い没入感と臨場感を提供します。高速道路や一般道路において多様な走行シナリオに対応でき、自動運転、運転支援システム、車載HMIの評価など、幅広い研究・開発に活用しています。 |

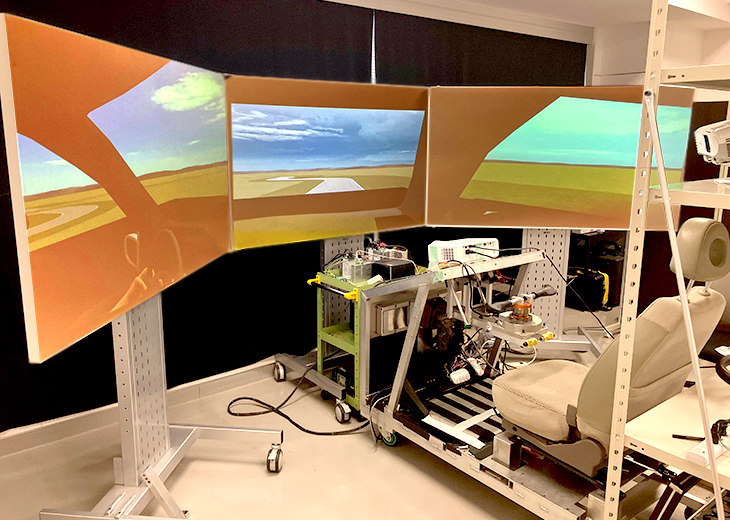
| ドライビングシミュレータ | |
|---|---|
| 設置場所 | 30号館106室 |
| 管理者 | 石橋基範 |
| 説明 | 42V型ディスプレイの3面。HMI、AD/ADAS等の人間工学研究に利用。 ※ 現在、新しいシミュレータへの更新作業中 |
| ドライビングシミュレータ | |
|---|---|
| 設置場所 | 40号館309室 |
| 管理者 | 風間恵介 |
| 説明 | 定置型DS 車両運動や安全関係の研究に活用。 |
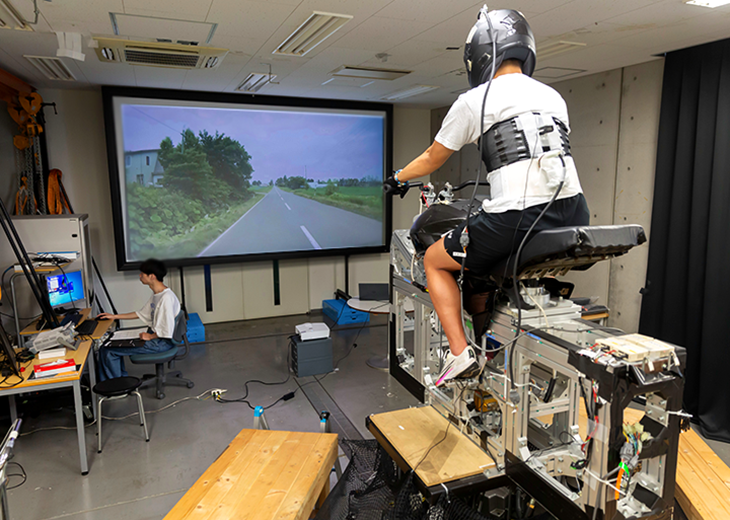
| 二輪車用6軸制御ムービングベース | |
|---|---|
| 設置場所 | 38号館110室 |
| 管理者 | 栗谷川幸代 |
| 説明 | 電動式で3軸方向並進及び回転運動を実現します。研究目的に応じて、台上のステイを介することで、二輪車や四輪車用シートなどを取り付けることが可能です。振動下における二輪車用ライダモデル構築や車載HMI評価などに活用しています。 |

| 自動運転実験車両 | |
|---|---|
| 設置場所 | 14号館脇四輪ガレージ |
| 管理者 | 風間恵介 |
| 説明 | 自動運転の研究のみならず,予防安全の研究にも活用。 |

| パーソナルモビリティ実験車両 | |
|---|---|
| 設置場所 | 14号館脇四輪ガレージ |
| 管理者 | 栗谷川幸代 |
| 説明 | 市販の小型電動自動車です。荷台に計測器等を積むことで、実車運転時のドライバ運転操作や車両挙動の計測が可能です。例えば、運転支援システム構築に向けて、ドライバ感覚やドライバ状態の計測などに活用しています。 |

| 新操舵システム実験車両 | |
|---|---|
| 設置場所 | 12号館脇駐車場 |
| 管理者 | 風間恵介 |
| 説明 | 通常のステアリングに加えて,様々な操舵系を実装可能な実験車両。 |

| 電気自動車実験車 | |
|---|---|
| 設置場所 | 31号館 |
| 管理者 | 加藤修平 |
| 説明 | 再エネ発電量と同時同量のリアルタイム充電や効率的な走行方法の実験検証が可能。 車両情報計測データ(走行用バッテリ電圧、電流、車速、ステアリング角度、など)のCAN信号も計測できる。 |
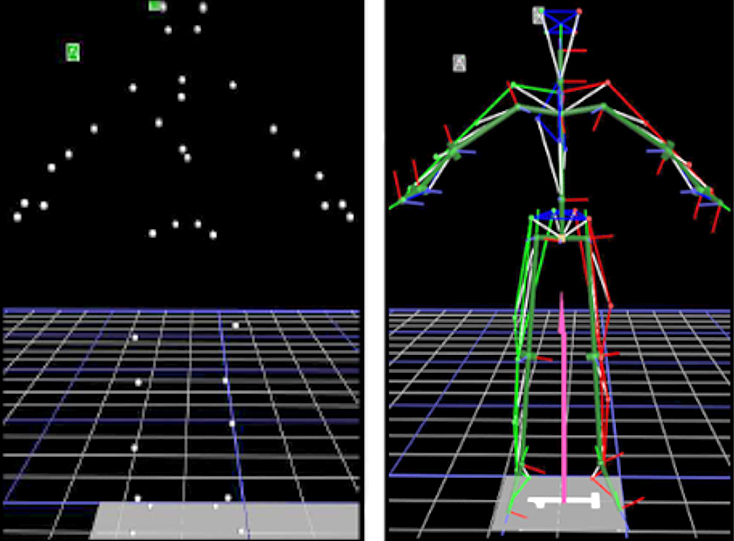
| 三次元人体動作計測・筋骨格モデル動作解析システム | |
|---|---|
| 設置場所 | 38号館202室 |
| 管理者 | 栗谷川幸代 |
| 説明 | 赤外線カメラ12台と床に設置した2枚の反力計測装置によって、高精度な三次元位置計測と設定によっては筋骨格モデルの構築が可能です。ドライバの車載HMI操作時の動作解析、歩行者の動作解析、技術伝承に向けた佐官作業者の動作計測など、多様な研究に活用しています。 |

| モーションキャプチャー測定装置 | |
|---|---|
| 設置場所 | 23号館204室 |
| 管理者 | 髙橋亜佑美 |
| 説明 | 複数カメラで被験者の三次元動作を計測。筋骨格解析モデルと連携することで、関節モーメントや筋活動を推定し、運転動作・乗員姿勢の力学的評価に活用。 |

| モーションキャプチャーシステム(e-skin MEVA) 専用スーツ | |
|---|---|
| 設置場所 | 40号館309室 |
| 管理者 | 風間恵介 |
| 説明 | 運転中の下半身の動きを計測するために使用しています。 |
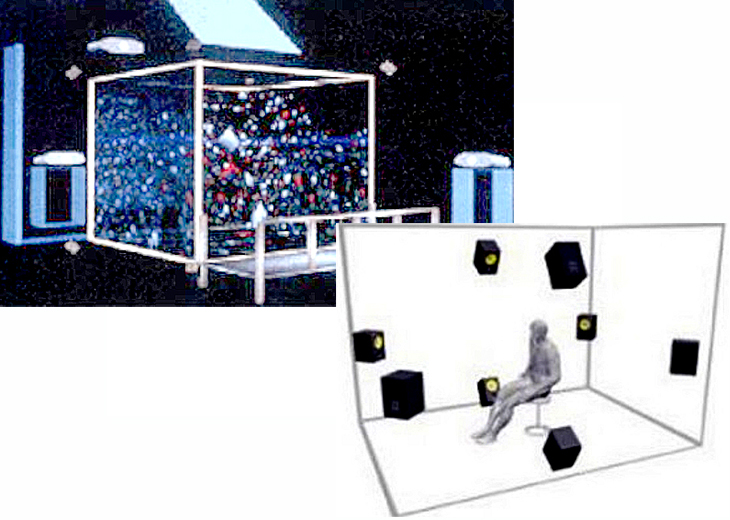
| 3D音響再現システム | |
|---|---|
| 設置場所 | 38号館205室 |
| 管理者 | 栗谷川幸代 |
| 説明 | 音をベースとしたHMIの設計において被験者が空間上にいる感覚を与えることが出来る。 |
| 音響シミュレーション解析システム | |
|---|---|
| 設置場所 | 23号館204室 |
| 管理者 | 髙橋亜佑美 |
| 説明 | 車室内の振動・音響解析や車両用防音材の音響特性解析、多孔質材料のモデル化を行う。車室内の静粛性向上に向けた研究に活用。 |

| 非接触視線計測装置 | |
|---|---|
| 設置場所 | 30号館106室 |
| 管理者 | 石橋基範 |
| 説明 | ステレオカメラを使って画面上の視認個所を計測する。校正不要のモードを持ち、実験の流れに応じた計測フローをGUIベースで作成できる。 |
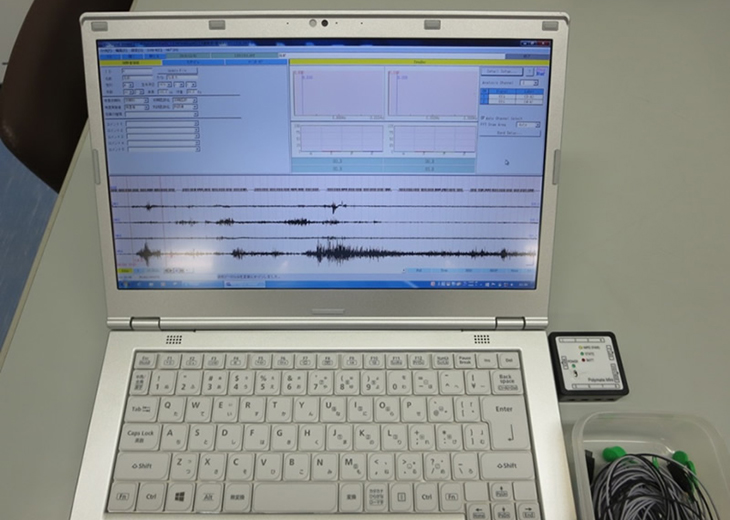
| 生体信号計測解析装置 (写真右:ワイヤレス計測装置、解析ソフトウェア) | |
|---|---|
| 設置場所 | 30号館107室 |
| 管理者 | 石橋基範 |
| 説明 | 50mm四方程度の小型計測装置で8入力(例:脳波なら8ch,筋電図なら4ch)まで計測できる。汎用的な生体信号処理を計測PC上で実施 |
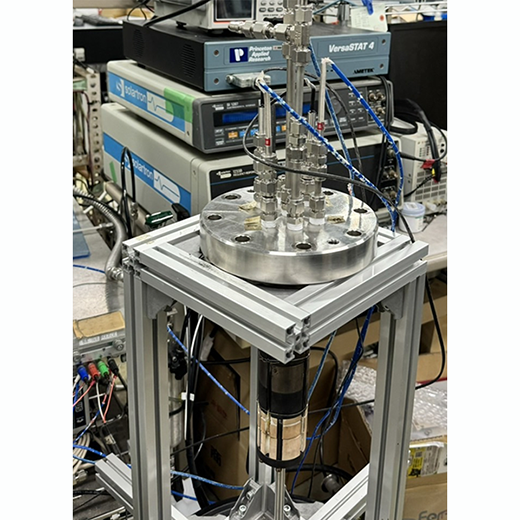
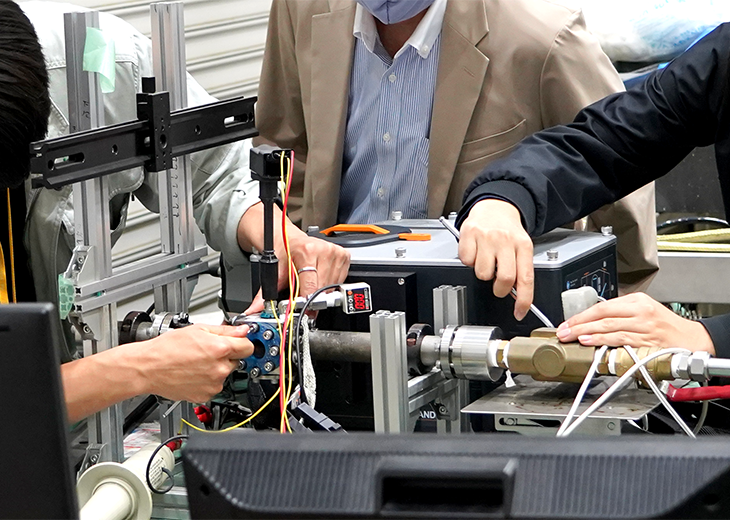
| 固体酸化物形燃料電池の作製・性能試験装置 | |
|---|---|
| 設置場所 | 40号館110室 |
| 管理者 | 野村浩司 |
| 説明 | 発電環境(温度・圧力・流量)を実験パラメータとし,コイン型固体酸化物形燃料電池(SOFC)の発電性能を評価するための実験装置。発電環境温度800℃,圧力5 MPaまでの発電試験が行える。 |
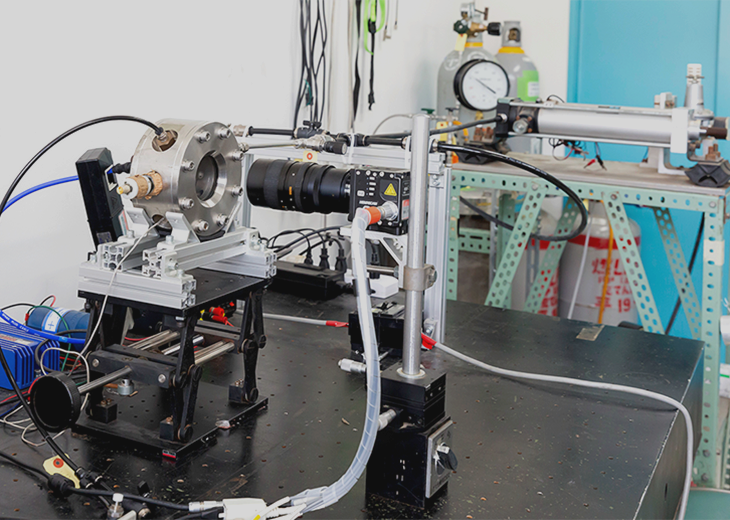
| 点火プラグの性能評価用旋回流動燃焼場発生装置 | |
|---|---|
| 設置場所 | 8号館111室 |
| 管理者 | 菅沼祐介 |
| 説明 | 火花点火機関における点火プラグの性能評価を行う装置。 定容燃焼容器内に混合気の旋回流を発生させ,高速度カメラによる燃焼挙動の直接観察, および圧力履歴を取得することができる。 |
| 3次元燃焼特性計測装置 | |
|---|---|
| 設置場所 | 40号館101室 |
| 管理者 | 今村 宰 |
| 説明 | 準備中 |
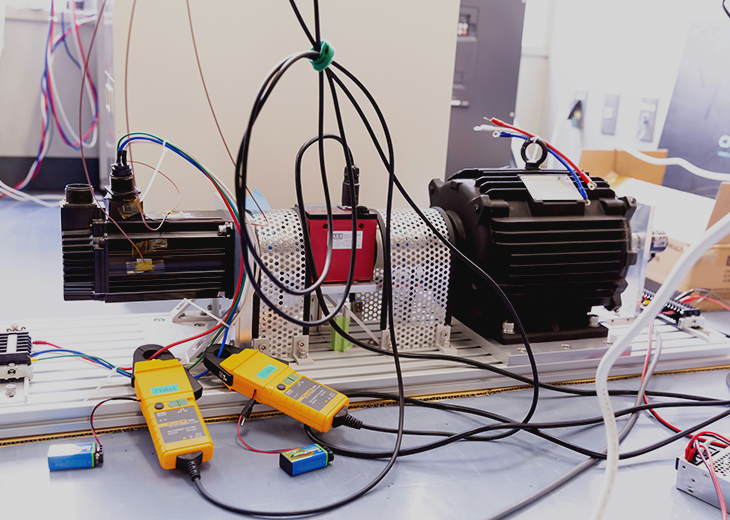
| 燃料電池自動車の下り坂走行時回生電力量模擬測定装置 | |
|---|---|
| 設置場所 | 31号館604室 |
| 管理者 | 加藤修平 |
| 説明 | 供試モータ、誘導機、トルク検出器で構成され、定格3.7kWまでの力行・回生運転時のモータ諸特性の評価が可能 |
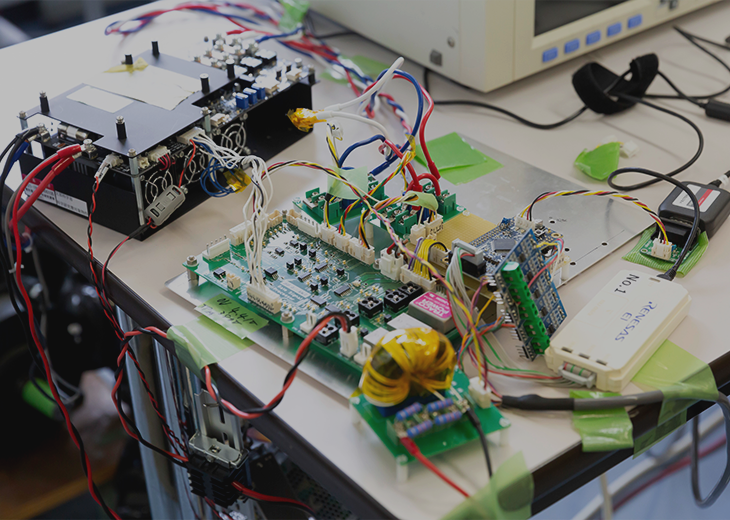
| 回生電力量測定・制御用電子機器 | |
|---|---|
| 設置場所 | 31号館604室 |
| 管理者 | 加藤修平 |
| 説明 | 任意のゲート信号で高周波スイッチングが可能な三相PWMインバータ、広帯域なパワーメータ、力行回生が可能なバッテリ模擬装置で構成されるパワートレインの電力評価装置。 |
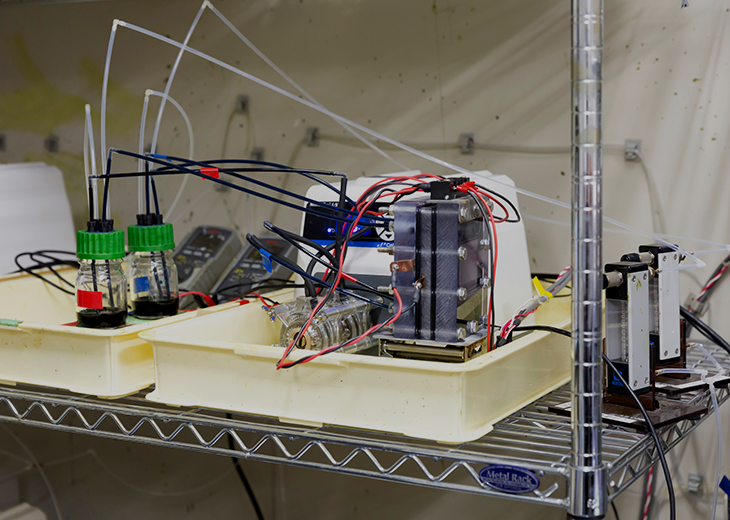
| レドックスフロー電池 | |
|---|---|
| 設置場所 | 31号館301室 |
| 管理者 | 工藤祐輔 |
| 説明 | 直流電源電子負荷装置によりレドックスフロー電池のような二次電池の性能を評価する装置です。また,インピーダンスアナライザにより電池の交流インピーダンスを測定する事が可能です。 |

| 静電噴霧現象を利用した燃料電池用電極の作成装置 | |
|---|---|
| 設置場所 | 31号館301室 |
| 管理者 | 工藤祐輔 |
| 説明 | 高電圧を印加して液体を微細化する静電噴霧現象を利用した薄膜作製装置です。微細化された帯電液滴により多孔質な薄膜の製造を行います。 |

| フィラメントワインディング装置 | |
|---|---|
| 設置場所 | 38号館111室 |
| 管理者 | 坂田憲泰 |
| 説明 | FRP(繊維強化プラスチック)の円筒材や,燃料電池自動車用高圧水素タンクの成形に用いられる装置です。 熱硬化性樹脂だけでなく,熱可塑性樹脂を用いた成形にも対応しています。 |

| 全自動摩擦圧接機 | |
|---|---|
| 設置場所 | 12号館110室 |
| 管理者 | 前田将克 |
| 説明 | 回転式摩擦圧接は棒状あるいは管状部品の端部を他部品に接合するのに適しています。中空軸部品の製造のほか,スタッド(突起)形状の製造に利用されます。当研究室で所有している設備はサーボモータを装備して位相制御ができ,角柱体の角を合わせた接合も可能です。 |

| 全自動摩擦撹拌接合機 | |
|---|---|
| 設置場所 | 12号館110室 |
| 管理者 | 前田将克 |
| 説明 | 難溶接アルミニウム合金も接合できる摩擦攪拌接合(FSW)装置です。板材どうしの突合せ接合や重ね接合,打点間隔の狭いスポット接合も可能です。 |
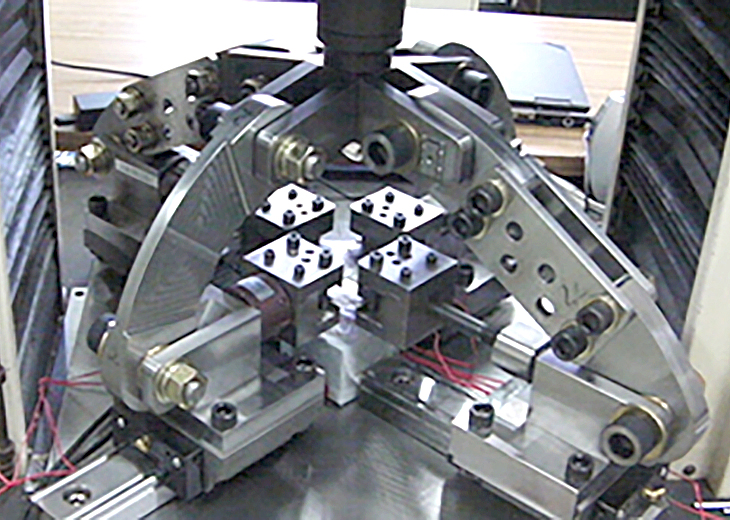
| 金属板材の2軸引張試験装置 | |
|---|---|
| 設置場所 | 12号館106室 |
| 管理者 | 鈴木康介 |
| 説明 | 一般的な一軸方向の引張試験とは異なり、直交する2軸方向で引張試験を行うことが可能です。二軸応力下での材料物性を測定することが可能で、金属材料の降伏関数の選定などに用いられています。 |

| 天然由来材料を用いたリサイクル複合材料成形機 | |
|---|---|
| 設置場所 | 8号館101室 |
| 管理者 | 鈴木康介 |
| 説明 | 最大荷重15ton、最大300度までの昇温可能な圧縮試験機で、単純な形状であれば金属金型も保有しています。落花生さやを使用した板やコースタ、皿の製作などの実績があります。。 |

| 研究用ドローン DJI Spreading Wings S1000 | |
|---|---|
| 設置場所 | 31号館402室 |
| 管理者 | 黒岩 孝 |
| 説明 | ジャイロセンサを備えた倒立振子タイプのロボットプラットフォームで、数十キロの可搬重量をもっています。 |
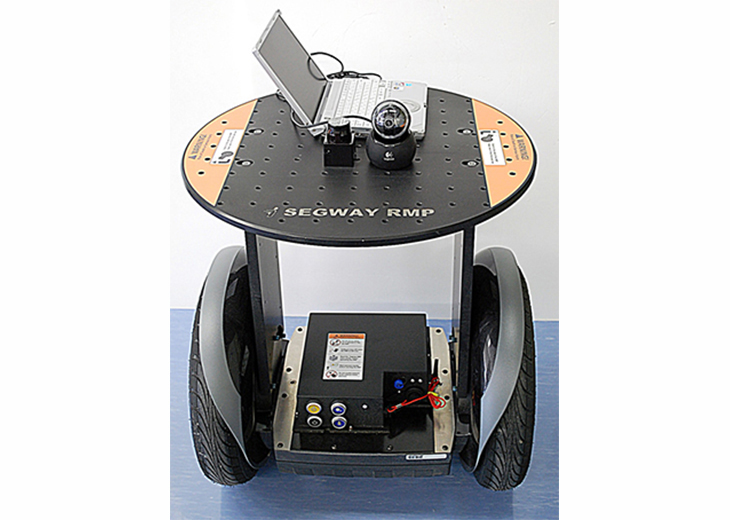
| 研究用ロボットプラットフォーム SEGWAY RMP200 | |
|---|---|
| 設置場所 | 31号館402室 |
| 管理者 | 黒岩 孝 |
| 説明 | ジャイロセンサを備えた倒立振子タイプのロボットプラットフォームで、数十キロの可搬重量をもっています。 |